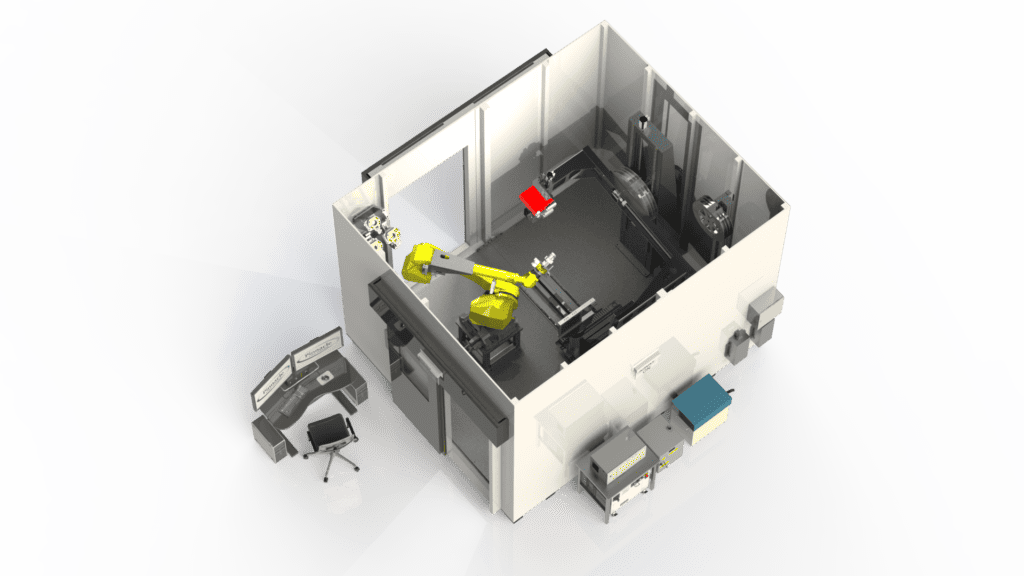
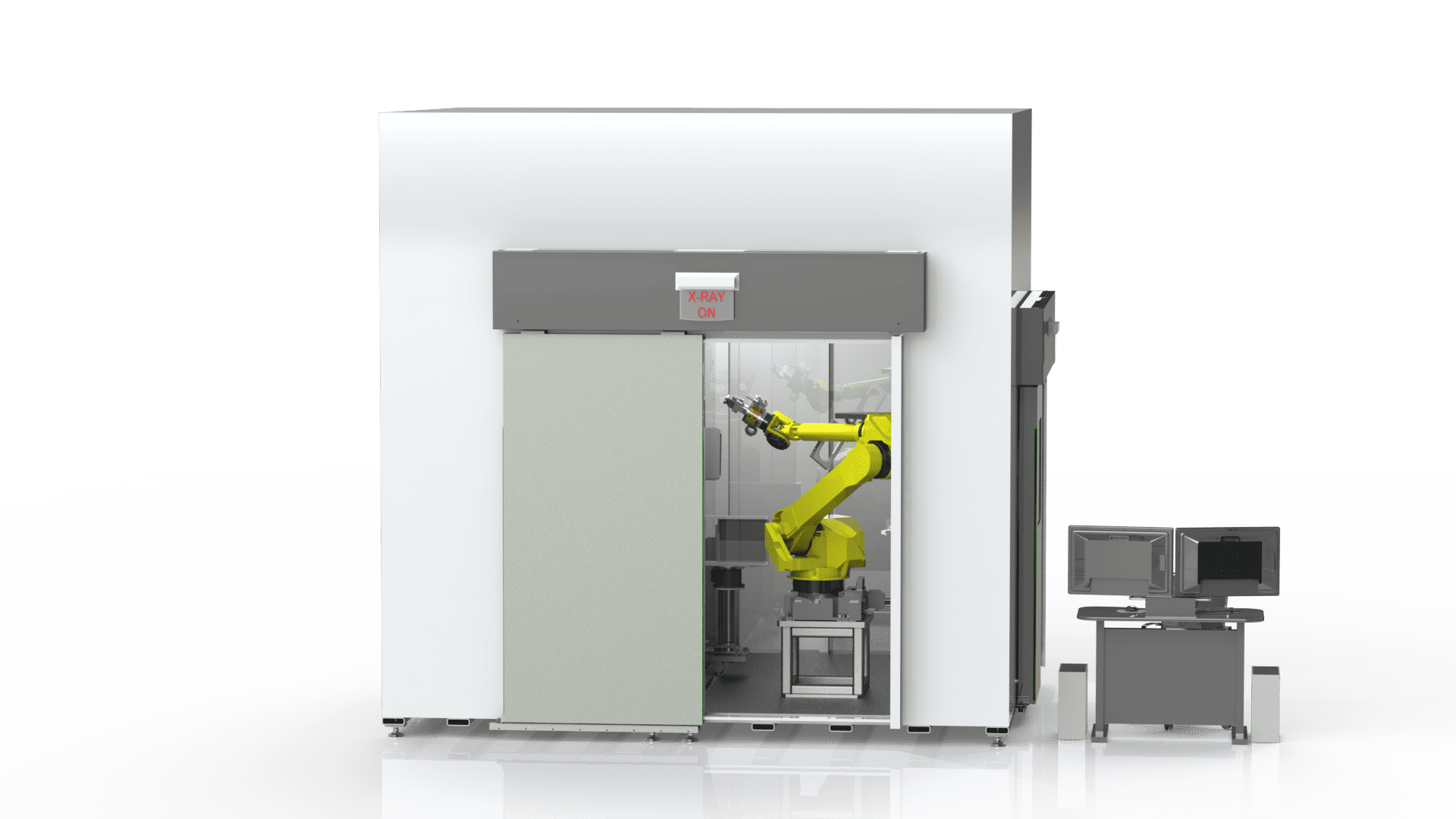
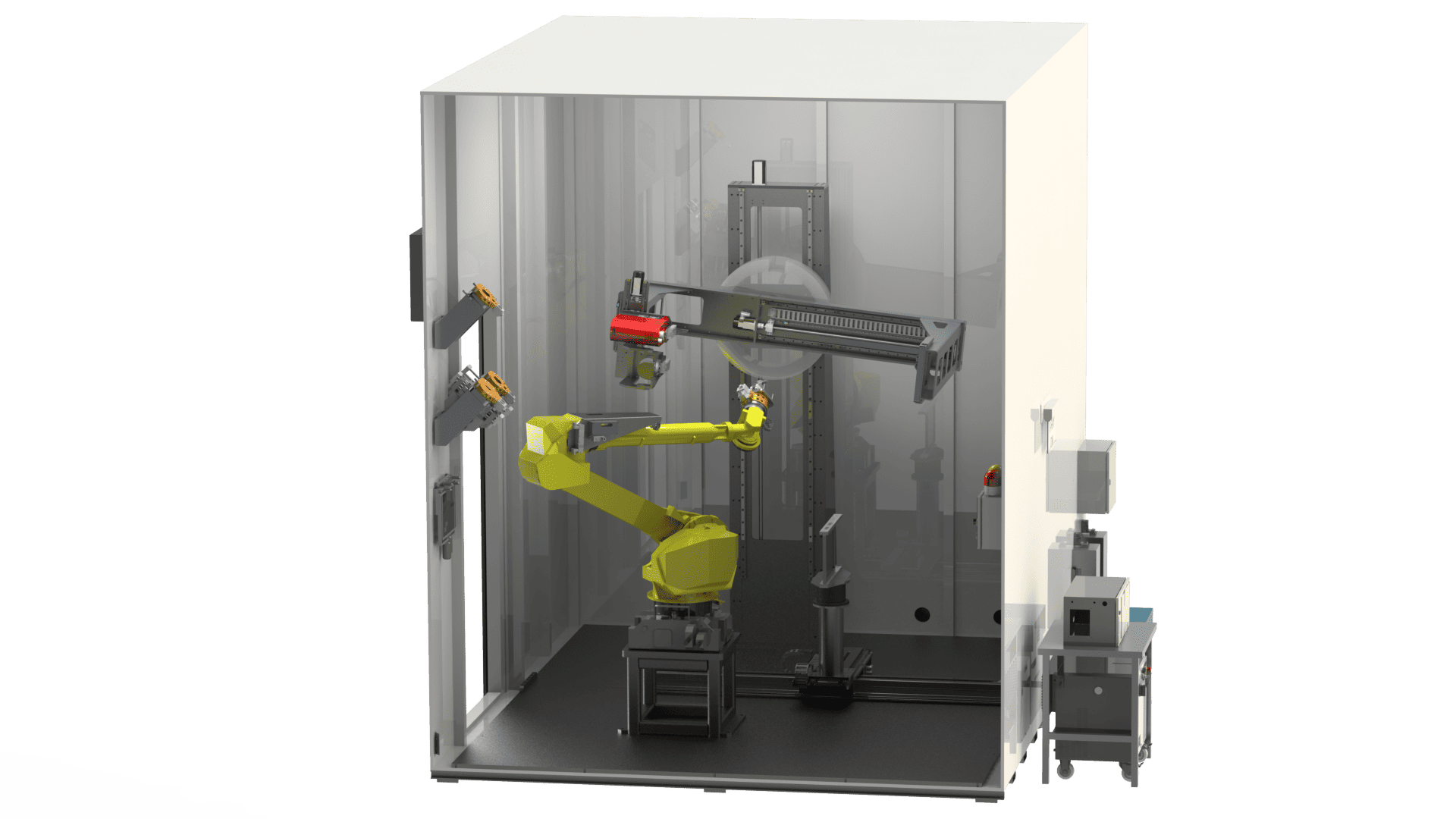
PXS-RCM (Robot C-Arm)
Part manipulation is implemented by a combination of robot motion and a C-Arm that is mounted inside the cabinet.
A robot/C-Arm combination is used for 3 reasons:
- Parts are longer than the reach of the robot arm
- The inspection requires complex angles and can not be achieved with the robot freedom of motion alone
- Parts are large and they can not be move over the full required length without a very large cabinet. This concept could save floor space as the cabinet can be smaller in certain cases.