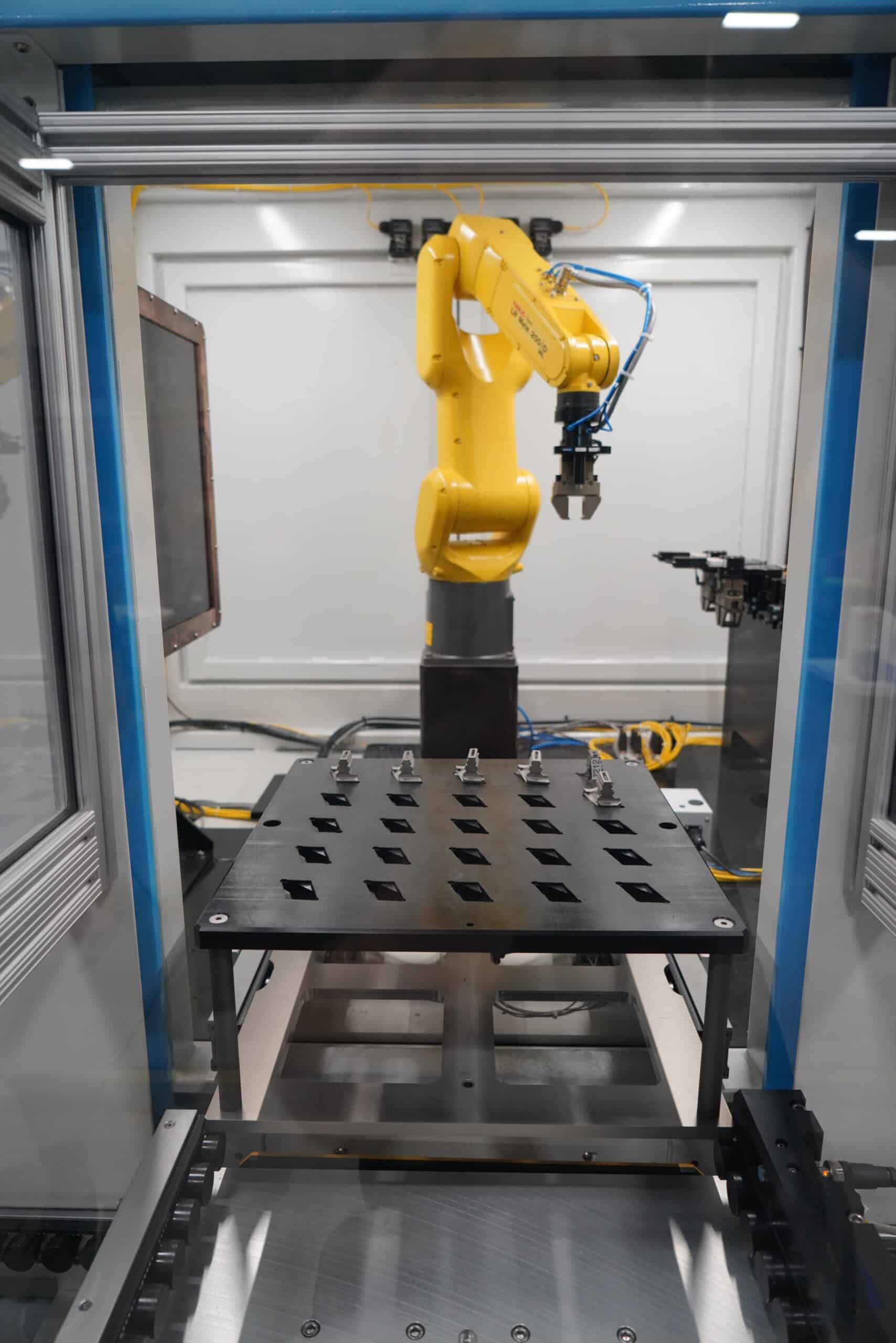
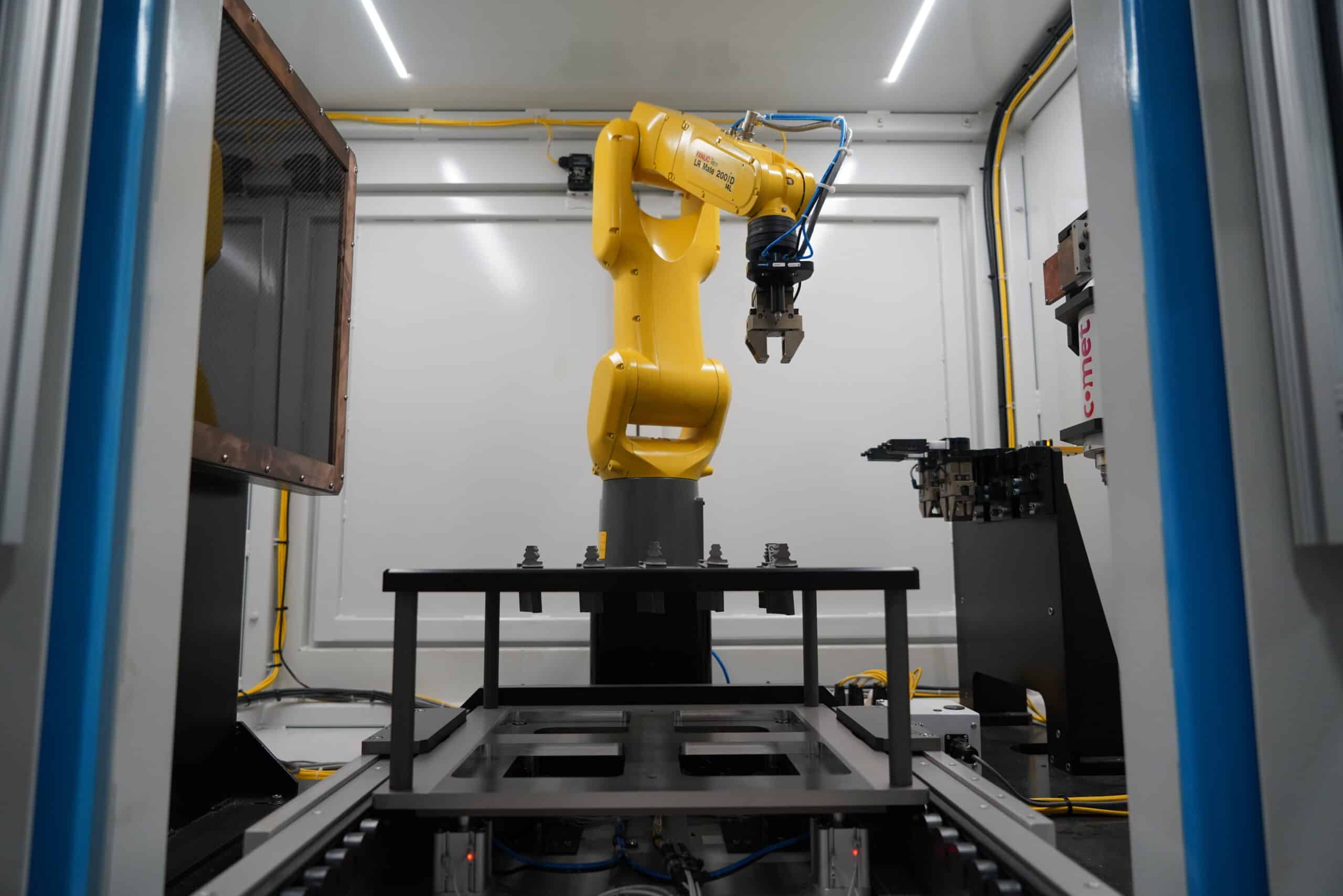
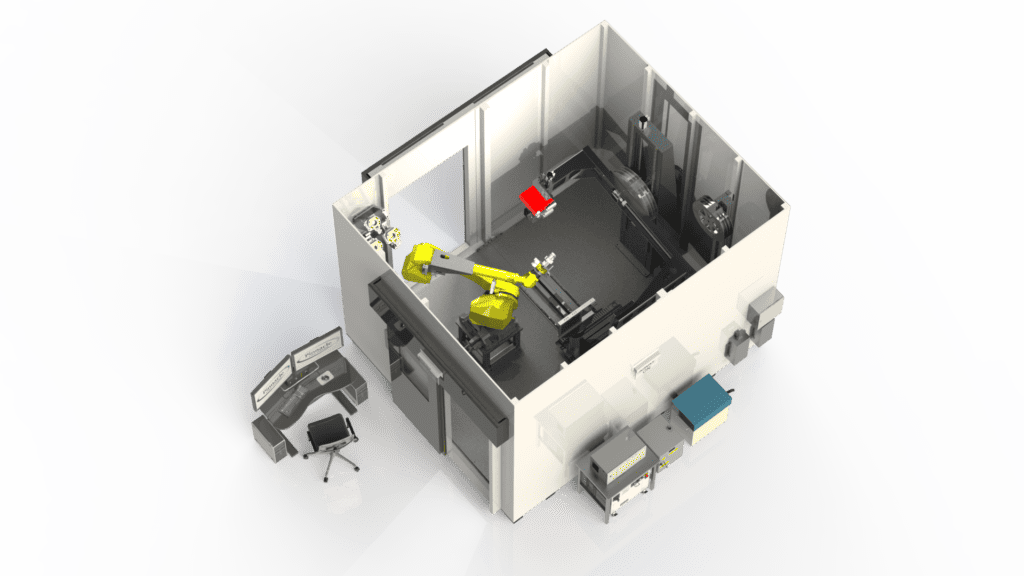
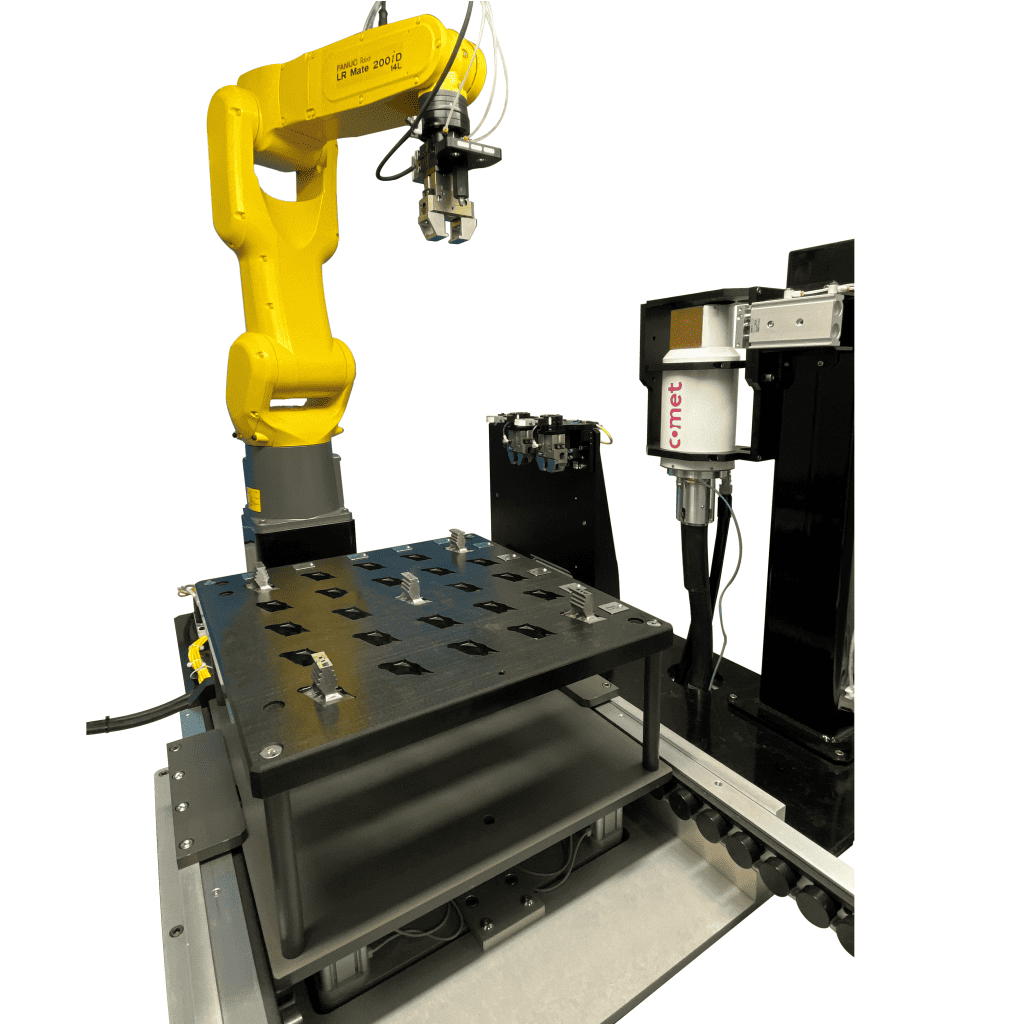
This configuration uses the robot to manipulate the part in the X-Ray beam. No additional manipulator is required.
The robot can be used to grab the parts from a multi part palette or from a conveyor system.